
Page 4 - Ketterer Antriebe – Broschüre BLDC-Technologie
P. 4
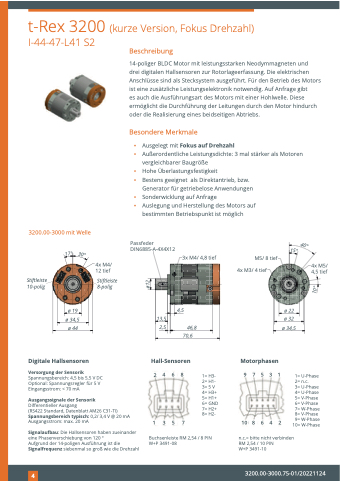
t-Rex 3200 (kurze Version, Fokus Drehzahl) I-44-47-L41 S2
3200.00-3000 mit Welle
Stiftleiste 10-polig
ø 19
Digitale Hallsensoren Versorgung der Sensorik
4x M4/ 12 tief
Stiftleiste 8-polig
Passfeder DIN6885-A-4X4X12
13,5 2,5
3x M4/ 4,8 tief
70,6
M5/ 8 tief 4x M3/ 4 tief
Motorphasen
9 7 5 3 1
10 8 6 4 2
4x M5/ 4,5 tief
Beschreibung
14-poliger BLDC Motor mit leistungsstarken Neodymmagneten und
drei digitalen Hallsensoren zur Rotorlageerfassung. Die elektrischen Anschlüsse sind als Stecksystem ausgeführt. Für den Betrieb des Motors ist eine zusätzliche Leistungselektronik notwendig. Auf Anfrage gibt
es auch die Ausführungsart des Motors mit einer Hohlwelle. Diese ermöglicht die Durchführung der Leitungen durch den Motor hindurch oder die Realisierung eines beidseitigen Abtriebs.
Besondere Merkmale
▪ Ausgelegt mit Fokus auf Drehzahl
▪ Außerordentliche Leistungsdichte: 3 mal stärker als Motoren
vergleichbarer Baugröße
▪ Hohe Überlastungsfestigkeit
▪ Bestens geeignet als Direktantrieb, bzw.
Generator für getriebelose Anwendungen
▪ Sonderwicklung auf Anfrage
▪ Auslegung und Herstellung des Motors auf
bestimmten Betriebspunkt ist möglich
ø 22
ø 34,5
4,5
46,8
ø 32
ø 44
ø 34,5
Spannungsbereich: 4,5 bis 5,5 V DC Optional: Spannungsregler für 5 V Eingangsstrom: < 70 mA
Ausgangssignale der Sensorik
Differentieller Ausgang
(RS422 Standard, Datenblatt AM26 C31-TI) Spannungsbereich typisch: 0,2/ 3,4 V @ 20 mA Ausgangsstrom: max. 20 mA
Signalaufbau: Die Hallsensoren haben zueinander eine Phasenverschiebung von 120 °
Aufgrund der 14-poligen Ausführung ist die Signalfrequenz siebenmal so groß wie die Drehzahl
Hall-Sensoren
2468
1 3 5 7
1= H3- 2= H1- 3= 5 V 4= H3+ 5= H1+ 6= GND 7= H2+ 8= H2-
1= U-Phase 2= n.c.
3= U-Phase 4= U-Phase 5= V-Phase 6= V-Phase 7= W-Phase 8= V-Phase 9= W-Phase
Buchsenleiste RM 2,54 / 8 PIN W+P 3491-08
n.c.= bitte nicht verbinden RM 2,54 / 10 PIN
W+P 3491-10
10= W-Phase
41
3200.00-3000.75-01/20221124
40°
17°
15°
30°
ø12
10°
